La fonction de navigation du logiciel doit être utilisée avec prudence. Le logiciel vous indiquera l’itinéraire le plus rapide, mais pas forcément le plus mieux adapté.
Le logiciel, tout à l’heure, indiquait qu’un empannage vers le sud, en direction de la Zone d’exclusion antarctique (ZEA), puis un empannage dans le sens inverse, avec le système suivant, étaient nécessaires. C’était tentant. Notre petit groupe, en effet, avait accéléré, et s’était dispersé. Alan, Éric et Enda étaient restés dans des vents forts, et nous avions été rattrapés, quant à nous, par des vents plus légers, de sorte que les autres étaient vraiment en train de se détacher.
Mais de nombreux autres paramètres du fichier météo GRIB devaient être pris en compte. Quid de la précision des polaires, par ailleurs ? Et de ma volonté de faire ce qui était suggéré ? Nous avons attendu le changement de direction du vent pendant de longues heures. Il ne s’est finalement pas produit, et nous avons continué vers l’est. Nous aurions à n’en pas douter perdu davantage de milles si nous nous en étions tenus à l’itinéraire suggéré par l’ordinateur, et si nous avions empanné quand celui-ci nous a indiqué que c’était nécessaire.
Nous avons donc dû confronter les données du fichier GRIB, pour cette simulation, avec la vitesse et la direction du vent dans le monde réel. Et nous avons dû nous poser la question de savoir si nous souhaitions prendre le risque de nous voir infliger une amende si nous traversions la ZEA. Devions-nous par ailleurs envoyer le gennaker de tête de mât dans un vent aussi fort ?
Nous avons donc reporté la manœuvre et attendu la confirmation des données, qui ne s’est pas produite. Nous avions donc manifestement effectué le bon choix. Nous demeurons à la traîne, et nous ne rattrapons pas notre retard, mais nous sommes beaucoup moins loin derrière que si nous avions suivi les indications de l’ordinateur.
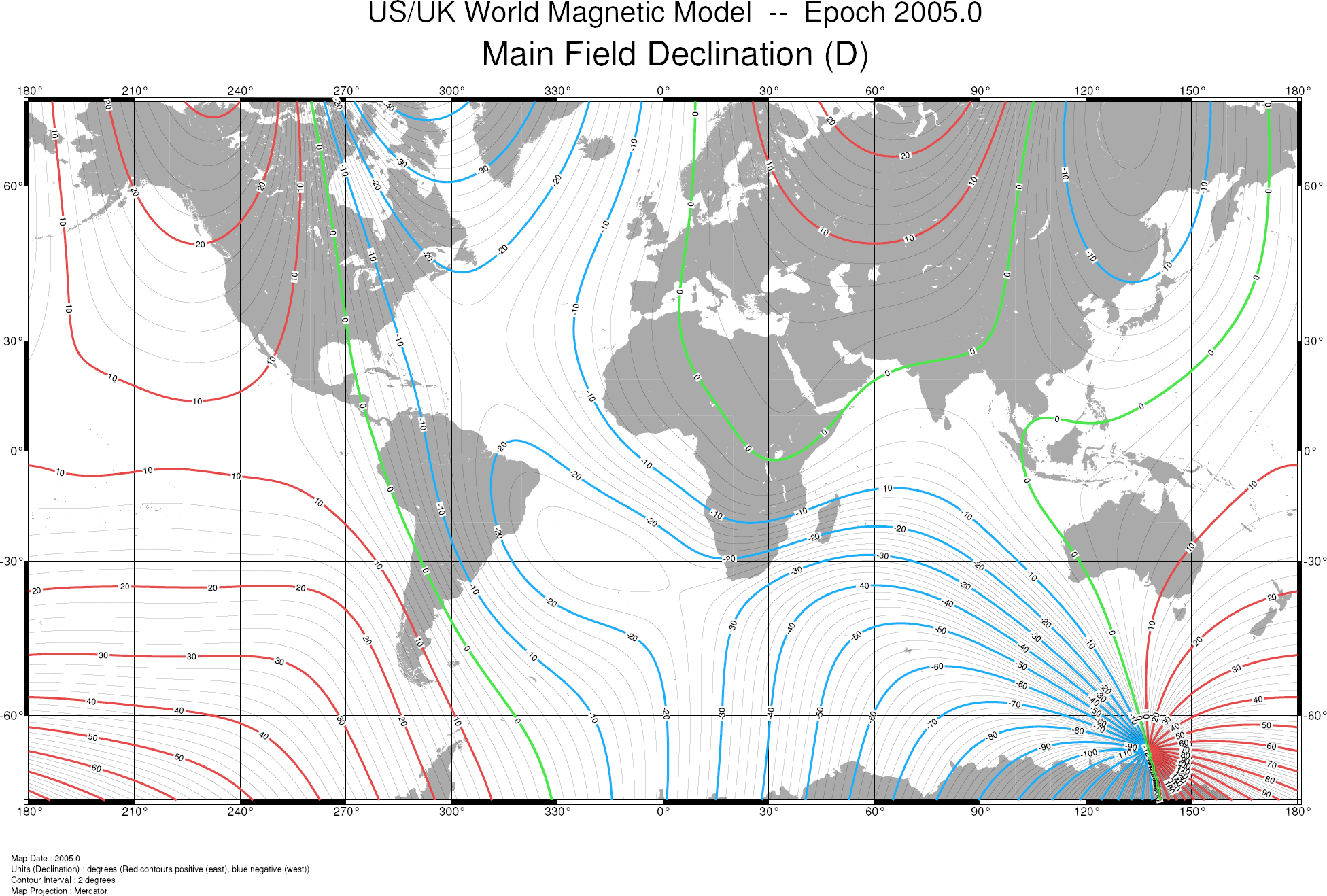
Nous travaillons actuellement sur une autre bizarrerie, et sur une drôle de coïncidence. Nous étudions les différences, à la marge, entre les indications de notre pléthore de boussoles. Nous avons été confrontés, dans le passé, à un problème de déclinaisons magnétiques : une boussole avait été accidentellement obstruée, et ne recevait par conséquent pas l’ensemble des données du système GPS satellite requises. J’ai alors pensé au MagVar. J’ai regardé trois de nos boussoles, dans les données électroniques, et le MagVar indiquait 0 degré. Je me suis dit : « ça recommence ». Je me suis alors souvenu que le pôle magnétique qui prévalait, ici, dans l’océan Indien, était le pôle sud, que le MagVar pouvait donc se modifier rapidement, et que cela était parfois susceptible d’influer sérieusement sur les boussoles. J’ai donc vérifié sur Internet (oui, j’y ai accès ici !). J’ai trouvé la carte de déclinaison magnétique, pour constater que nous nous trouvions, précisément, sur la ligne d’assiette longitudinale de zéro degré !
Position
47° 0’S x 132° 17’E
Cap
105°
Vitesse réelle
15,5 nœuds
Carnet de bord
13, 757 nm
Voilure
Grand-voile (un ris) et gennaker fractionné
Vitesse du vent réel
19,6 nœuds
Direction du vent réel
332°
Température de l’air
57° F / 13,8° C
Température de la mer
53° F / 11,6° C
| Tours de manivelle sur colonne de winch (par jour) | Ampères-heures : Alternateur (total) | Ampères-heures : Solaire (total) | Ampères-heures: Hydraulique (total) | Ampères-heures: Éolien (total) |
| — | 3137 | 595 | 11634 | 1899 |